2019-7-3 20:56:48
C++并发编程阅读笔记
参考链接:
第1章 你好,C++的并发世界
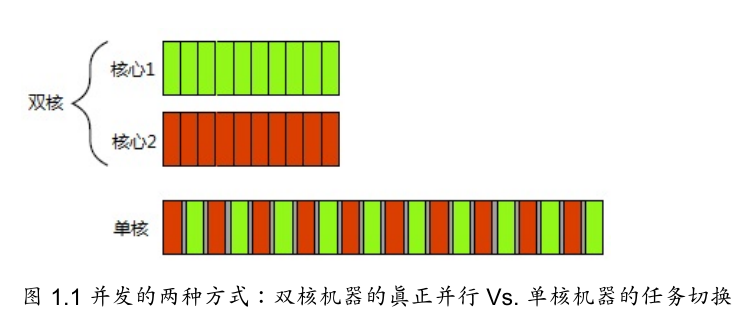
1.1.1 何谓并发
并发:CPU交替使用时钟,模拟并发
并行:线程的真正并行执行
1.1.2 并发的途径
- 多进程并发:将应用程序分为多个独立的进程,它们在同一时刻运行,就像同 时进行网页浏览和文字处理一样。
- 多线程并发:在单个进程中运行多个线程。线程很像轻量级的进程:每个线程相互独 立运行,且线程可以在不同的指令序列中运行。进程中的所有线程都共享地址空间, 并且所有线程访问到大部分数据———全局变量仍然是全局的,指针、对象的引用或数据可 以在线程之间传递。
注意:Linux 一般允许的最大堆栈为8-10M,需要自己设置扩容
程序并发的方式有2种:
- 程序执行并行:不同的线程执行,不同的过程
- 数据并行:不同的线程执行相同的程序,处理不同的数据。
1.4 开始入门
开始多线程编程的一个简单例子:
#include <iostream>
#include <thread>
void hello()
{
std::cout<<"Hello Concurrent World\n";
}
int main()
{
//设置线程初始函数名称
std::thread t(hello);
t.join();
}
第2章 线程管理
2.1 线程管理的基础
main()函数就是一个程序的主要线程,其它线程主要由函数的入口所决定。当线程执行完入口函数后,线程也会退出。
2.1.1 启动线程
参考链接: c++并发编程
线程在std::thread对象构造时就开始启动了,无返回值时,启动后自动结束,存在返回值时,参数传递完成后结束。
std::thread允许使用带有函数调用符类型的实例传入std::thread类中,来替换默认的构造函数
class background_task
{
public:
void operator()() const
{
do_something();
do_something_else();
}
};
background_task f;
std::thread my_thread(f);
注意: 当把函数对象传入到线程构造函数中时,如果你传递一个临时变量,而不是一个命名的变 量;C++编译器会将其解析为函数声明,而不是类型对象的定义。
std::thread my_thread(background_task());
// 声明了一个名为my_thread的函数,函数指针指向没有参数并返回background_task对象的函数;返回一个std::thread对象的函数,而非启动了一个线程
//使用多组括号或者新的统一初始化语法可以避免这个问题
std::thread my_thread((background_task()));
std::thread my_thread{background_task()};
//使用lambda表达式也能避免这个问题
std::thread my_thread([]{
do_something();
do_something_else();
});
如果没有指定线程的销毁std::thread对象会在析构函数中调用std::terminate()进行对象销毁和析构。
注意:
- 如果需要自己指定线程销毁,必须在
std::thread对象销毁之前决定 - 如果不主动等待线程结束,就必须保证线程结束之前,数据的有效性,避免线程还未结束,函数已经退出,变量成为销毁的局部变量
struct func
{
int& i;
func(int& i_) :i(i_){}
void operator() ()
{
for (unsigned j=0 ; j<1000000 ; ++j)
{
do_something(i);
// 1. 潜在访问隐患:悬空引用
}
}
};
void oops()
{
int some_local_state=0;
func my_func(some_local_state);
std::thread my_thread(my_func);
my_thread.detach();
// 2. 不等待线程结束
} // 3. 新线程可能还在运行
对于上述的处理方法是将数据复制到线程中,使得线程函数的功能齐全。而非复制到共享数据中。此外,可以通过join()函数来确保线程在函数完成前结束。但是join()只是简单粗暴的等待线程完成或者不等待。等待线程完成的例子如下:
struct func; //定义在清单2.1中
void f()
{
int some_local_state=0;
func my_func(some_local_state);
std::thread t(my_func);
//使用异常捕获,保证访问本地状态的线程退出后,函数才结束
try
{
do_something_in_current_thread();
}catch(...)
{
t.join(); /* 等待线程结束 */
throw;
}
t.join(); /* 等待线程结束 */
}
/*使用“资源获取即初始化方式”(RAII,Resource Acquisition Is Initialization)等待线程退出*/
class thread_guard
{
std::thread& t;
public:
explicit thread_guard(std::thread& t_):t(t_)
{
}
~thread_guard()
{
//判断线程是否已经开始加入
if(t.joinable())
{
//析构函数中使得线程被加入到原始线程中
t.join();
}
}
/* 禁止使用默认的拷贝构造函数 */
thread_guard(thread_guard&)=delete;
/* 禁止使用赋值函数 */
thread_guard& operator=(thread_guard const&)=delete
};
struct func;
void f()
{
int some_local_state=0;
func my_func(some_local_state);
std::thread t(my_function);
thread_guard g(t);
thread_guard g(t);
do_something_in_current_thread();
}
//函数结束,局部对象开始逆序销毁,
2.1.4 后台运行线程
使用detach()会让线程在后台运行。意味着主线程不能与该线程产生直接互交。使得线程实现分离,并且由C++编译器实现资源的回收。
通常称分离线程为守护线程(daemon threads);UNIX中守护线程是指,没有任何显式的用户接 口,并在后台运行的线程。这种线程的特点就是长时间运行;线程的生命周期可能会从某一个应用起始到结束,可能会在后台监视文件系统,还有可能对缓存进行清理,亦或对数据结构进行优化。另一方面,分离线程的另一方面只能确定线程什么时候结束,发后即忘(fire and forget)的任务就使用到线程的这种方式。
std::thread t(do_background_work);
t.detach();
assert(!t.joinable());
//线程分离之后与之前的主线程无关
//多线程处理文档的示例:
void edit_document(std::string const& filename)
{
open_document_and_display_gui(filename);
while(!done_editing())
{
user_command cmd=get_user_input();
if(cmd.type==open_new_document)
{
std::string const new_name=get_filename_from_user();
//启动一个新线程开始显示和处理文档
std::thread t(edit_document,new_name);
//分离线程
t.detach();
}else{
process_user_input(cmd);
}
}
}
2.2 向线程函数传递参数
参考链接: C++11的6种内存序总结;
线程调用的默认参数要拷贝到线程独立内存中,几十参数是引用的形式,也可以在新线程中进行访问。
void f(int i,std::string const& s);
std::thread t(f,3,"hello");
注意: 指向动态变量的指针作为参数传递给线程的情况,可能在传递过程中产生未定义的行为。使得程序崩溃
void f(int i,std::string const& s);
void oops(int some_param)
{
//指针变量
char buffer[1024];
//指针变量指向输入参数
sprintf(buffer,"%i",some_param);
//创建线程,输入指针函数
std::thread t(f,3,buffer);
/* 线程执行与主线程分离 */
t.detach();
}
//在从char*到std::string类型转换的过程中,函数很有可能在转化成功之前崩溃;但是`std::thread`的构造函数会复制提供的变量,就只复制了没有转换成期望类型的字符串字面值,最终造成程序崩溃。
//只要能在构造函数之前将字面值转换为`string`对象就可以了。
void f(int i,std::string const& s);
void not_oops(int some_param)
{
char buffer[1024];
sprintf(buffer,"%i",some_param);
//使用显示转换避免指针悬垂
std::thread t(f,3,std::string(buffer));
t.detach();
}
注意:
- 当想要在线程构造函数中传递参数为引用参数,使得变量在线程中进行更改的时候,需要使用
std::ref将参数转换成为引用的形式,避免其在构造的过程中使用默认拷贝。如std::thread t(update_data_for_widget,w,std::ref(data));;这样data就在线程前后发生了改变。 - 可以使用
std::move将一个参数,移动到线程中去。
//输如参数是一个只允许一个使用的指针
void process_big_object(std::unique_ptr<big_object>);
std::unique_ptr<big_object> p(new big_object);
p->prepare_data(42);
//使用move函数,进行移动语义,右值引用;将指针的所有权,交给线程内部的函数库
std::thread t(process_big_object,std::move(p));
2.3 转移线程所有权
为了保证线程控制句柄的有效性,std::thread支持使用std:move()函数实现函数的转移,但是线程的拷贝构造和赋值操作符决定了,它在进行复制时会先使用std::terminate()强制结束原来已有的线程,再接受新句柄;即说明:不能通过赋一个新值给std::thread 对象的方式来“丢弃”一个线程。
void some_function();
void some_other_function();
//直接构造线程对象
std::thread t1(some_function);
//移动线程句柄到t2,之后t1无用
std::thread t2=std::move(t1);
//创建拷贝的时候,默认隐式调用std::move()函数
t1=std::thread(some_other_function);
//创建线程对象
std::thread t3;
//t2线程句柄,交给t3
t3=std::move(t2);
//t1执行std::terminate()终止程序继续运行,保证与std::thread的析构函数行为一致,需要在
t1=std::move(t3);
建议的线程拷贝使用如下:
class scoped_thread
{
std::thread t;
public:
//直接获取线程的句柄函数
explicit scoped_thread(std::thread t_):
t(std::move(t_))
{
//线程以及结束过一次就返回失败
if(!t.joinable())
throw std::logic_error(“No thread”);
}
//析构函数结束线程
~scoped_thread()
{
t.join();
}
//拷贝构造函数
scoped_thread(scoped_thread const&)=delete;
//赋值操作符
scoped_thread& operator=(scoped_thread const&)=delete;
};
struct func; // 定义在清单2.1中
void f()
{
int some_local_state;
//条用拷贝构造函数
scoped_thread t(std::thread(func(some_local_state)));
//执行程序
do_something_in_current_thread();
}
void do_work(unsigned id);
void f1()
{
std::vector<std::thread> threads;
for(unsigned i=0; i<20; ++i)
{
//产生线程
threads.push_back(std::thread(do_work,i));
}
//对每个线程调用join();注意这里的mem_fn直接获取对象的函数指针
std::for_each(threads.begin(),threads.end(),std::mem_fn(&std::thread::join));
}
2.4 运行时决定线程数量
std::accumulate可以用来计算容器中元素的和,总体思路是利用std::thread::hardware_concurrency()返回并发在一个程序中的线程数量,由此来决定最终的线程数目。
template<typename Iterator,typename T>
//定义小块计算的类
struct accumulate_block
{
void operator()(Iterator frist,Iterator last,T& result)
{
//使用计算结果
result=std::accumulate(first,last,result);
}
};
//定义并行计算的模板函数
template<typename Iterator,typename T>
T parallel_accumulate(Iterator first,Iterator last,T init)
{
//计算元素的总数量
unsigned long const length=std::distance(first,last);
//长度为0直接返回初始值
if(!length)
{
return init;
}
//最小线程数量
unsigned long const min_per_thread=25;
//最大线程数量
unsigned long const max_threads=(length+min_per_thread-1)/min_per_thread;
//计算正在运行的线程数量
unsigned long const hardware_threads=std::thread::hardware_concurrency();
//计算真正的线程数量
unsigned long const num_threads=std::min(hardware_threads!=0?hardware_threads:2,max_threads);
//计算分块运行的数量
unsigned long const block_size=length/num_threads;
//准备结果数据
std::vector<T> results(num_threads);
//准备线程
std::vector<std::thread> threads(num_threads-1);
//遍历初始化数据
Iterator block_start=frist;
for(unsigned long i=0;i<(num_threads-1);++i)
{
//临时分块的终点
Iterator block_end=block_start;
//移动迭代器将其指向末尾
std::advance(block_end,block_size);
//初始化线程
threads[i]=std::thread(
accumulate_block<Iterator,T>(),
block_start,
block_end,
std::ref(results[i])
);
//更新迭代器位置
block_start=block_end;
}
//将剩余的数全部分到最后一个线程块
accumulate_block<Iterator,T>()(
block_start,last,results[num_threads-1]
);
//等待创建线程的完成
std::for_each(threads.begin(),
threads.end(),
std::mem_fn(&std::thread::join)
);
//计算求和
return std::accumulate(results.begin(),results.end(),init);
}
//注意:这里的迭代器都必须是前向迭代器,并且必须保证T存在默认的构造函数
2.5 识别线程
线程标示类型是std::thread::id,可以通过两种方式进行检索。
-
std::thread::get_id()函数直接来获取。当没有绑定线程时,函数返回std::thread::type - 在当前线程中调用
std::this_thread::get_id()获取当前的线程标识符
第3章 线程间共享数据
参考链接: C++并发编程学习——3.在线程间共享数据;线程间共享数据;
3.1 共享数据带来的问题
对于只读的数据是不存在操作之间的共享数据问题的,但是对于读写操作或者删除操作,需要添加而锁实现,数据的互斥和共享。注意使用条件竞争操作,避免恶性条件竞争。
避免思路:
- 对数据结构采取某种保护机制,确保只有进行修改的线程才能看到不变量被破坏时的中间状态。
- 对数据结构和不变量的设计进行修改,修改完成的结构必须能完成一系列不可分割的变化。即 无锁编程。
- ,使用事务的方式去处理数据结构的更新(这里的”处理”就如同对数据库进行更新一样)。所需的一些数据和读取都存储在事务日志中,然后将之前的操作合为一步,再进行提交。在被另外一个线程修改后,提交就无法进行。这成为“软件事务内存”。但是C+++中没有对
STM进行支持。
C++中保护共享数据的最基本方式是使用 C++标准库提供的互斥量
3.2 使用互斥两保护共享数据
3.2.1 C++中使用互斥量
c++中通过使用std::mutex创建互斥量,通过调用成员函数lock()/unlock()进行上锁/解锁。同时可以使用std::lock_guard(),在构造的时候提供已锁的互斥,并在析构的时候进行解锁,从而保证总是会被正确的解锁。
使用示例:
#include <list>
#include <mutex>
#include <algorithm>
//创建全局的互斥保护变量
std::list<int> some_list;
//互斥信号变量
std::mutex some_mutex;
void add_to_list(int new_value)
{
//使用std::lock_guard互斥访问数据
std::lock_guard<std::mutex> guard(some_mutex);
//添加数据
some_param.push_back(new_value);
}
bool list_contains(int value_to_find)
{
//互斥访问数据,为信号变量加锁
std::lock_guard<std::mutex> guard(some_mutex);
//查找对应的变量
return std::find(some_list.begin(),some_list.end(),value_to_find)!=some_list.end();
}
//大多数情况下,互斥变量会直接定义在同一个类中,而不是定义成全局变量。互斥量 和要保护的数据都必须定义为priavte成员。
//注意:函数返回的是被保护数据或者成员的指针时
3.2.2 精心组织代码来保护共享数据
针对返回指针或者引用会使得成员变量失去保护。这样互斥变量形同虚设。但是这些只要你确保没有在使用过程中显式调用就没有问题,但是更危险的是 将一个保护数据作为运行时参数 例如下面,无意中使用了保护数据的引用
class some_data
{
int a;
std::string b;
public:
void do_something();
};
class data_warpper
{
private:
some_data data;
std::mutex m;
public:
template<typename Function>
void process_data(Function func)
{
std::lock_guard<std::mutex> 1(m);
//在这里传递保护数据给用户函数
func(data);
}
}
//非保护数据
some_data* unprotected;
//恶意拷贝数据
void malicious_function(some_data& protected_data)
{
unprotected=&protected_data;
}
//数据指针
data_wrapper x;
void foo()
{
//传递一个恶意值,将类中的保护成员赋值给外部的非保护变量
x.process_data(malicious_function);
//执行操作,更改 内部的data值
nprotected->do_something();
}
3.2.3 发现接口内在的条件竞争
针对上面的问题,比较好的解决方案是将方法和接口封装好,避免在外部调用使得方法操作的安全性。例如下面一个stack的实现
//定义模板类和方法
template<typename T,typename Container=std::deque<T> >
class stack
{
public:
explicit stack(const Container&);
explicit stack(Container&& = Container());
template <class Alloc> explicit stack(const Alloc&);
template <class Alloc> stack(const Container&, const Alloc&);
template <class Alloc> stack(Container&&, const Alloc&);
template <class Alloc> stack(stack&&, const Alloc&);
bool empty() const;
size_t size() const;
T& top();
T const& top() const;
void push(T const&);
void push(T&&);
void pop();
void swap(stack&&);
};
为了防止多线程时的empty()和size()函数的操作,需要进行变量的互斥保护;保护的主要思想是通过线程锁,使得两个线程的存取操作具有原子事物性,操作的顺序先后固定。下面是一种可能的顺序
| Thread A | Thread B |
|---|---|
| if (!s.empty); | |
| int const value=s.top(); | |
| s.pop() | |
| do_something(value); | s.pop() |
标准库的stack类使用将这个操作分为了两个部分: 1. 获取顶部元素(top());2.从栈中移除(pop())。这样在不安全的将元素拷贝出去的情况下,栈中的这个数据依旧存在,没有丢失。
下面介绍一些其它的方法:
- 传入一个引用,作为想要的弹出值来进行使用。
std::vector<int> result;
some_stack.pop(result);
- 无异常抛出的拷贝构造函数或则移动构造函数
-
返回指向弹出值的指针
这样可以方便自由拷贝,并且不会产生异常,缺点是返回一个指针需要对内存分配进行管理,对于简单数据类型,内存管理的开销远大于直接返回值。通常使用
std::shared_ptr进行操作。 - “选项1+选项2”或“选项1+选项3”
下面是一个线程安全的堆栈的定义
#include <exception>
#include <memory>
#include <mutex>
#include <stack>
// 定义空栈函数
struct empty_stack: std::exception
{
const char* what() const throw() {
return "empty stack";
};
};
//定义模板类
template<typename T>
class threadsafe_stack {
private:
//保护成员变量
std::stack<T> data;
//互斥信号量
mutable std::mutex m;
public:
threadsafe_stack():data(std::satck<T>()){}
threadsafe_stack(const threadsafe_stack& other)
{
std::lock_guard<std::mutex> lock(other.m);
//在构造体中执行拷贝
data=other.data;
}
//禁用默认赋值
threadsafe_stack& operator=(const threadsafe_stack&)=delete;
//添加
void push(T new_value)
{
std::lock_guard<std::mutex> lock(m);
data.push(new_value);
}
std::shared_ptr<T> pop()
{
std::lock_guard<std::mutex> lock(m);
//在调用pop前,检查栈是否为空
if (data.empty())
{
throw empty_stack();
}
//在修改堆栈之前,分配出返回值
std::shared_ptr<T> const res(std::make_shared<T>(data.top()));
data.pop();
return res;
}
void pop(T& value)
{
std::lock_guard<std::mutex> lock(m);
if(data.empty()) throw empty_stack();
value=data.top();
data.pop();
}
bool empty() const
{
std::lock_guard<std::mutex> lock(m);
return data.empty();
}
};
//上面的检查拷贝操作全部都加上了锁,虽然性能有所损耗,但是实现了线程级安全。
3.2.4 死锁:问题描述及解决方案
问题描述在操作系统中有着较为详细的叙述,再次不做过多的解释。
解决问题的主要思路是:
- 死锁预防:
- 破坏互斥条件:资源互斥使用,无法破坏互斥条件
- 破坏不剥夺条件:后来者,强制抢夺资源,但会增加系统开销,降低吞吐量
- 破坏请求和保持条件:不再一直请求和保持状态;会严重浪费资源,还可能导致饥饿现象
- 破坏循环条件:会浪费系统资源,并造成编程不便
- 死锁避免:
- 安全状态:找到一个分配资源的序列能让所有进程都顺利完成。
- 银行家算法:采用预分配策略监察分配完成时系统是否处在安全状态。
- 死锁检测: 利用死锁定力简化资源分配图以检测死锁的存在。
- 死锁解除:
- 资源剥夺法:挂起某些死锁进程并抢夺它的资源,以便让其他进程继续推进。
- 撤销进程法:强制撤销部分、甚至全部死锁进程并剥夺这些进程的资源。
- 进程回退法:让进程回退到足以回避死锁的地步。
对于线程的具体实现思路是:让两个互斥量,总是以相同的顺序上锁。避免多线程对数据的修改时的死锁。c++标准库,提供了lock方法,可以一次锁住多个互斥量,并没有死锁风险。下面是一个简单的使用示例:
#include <mutex>
class some_big_object;
void swap(some_big_object& lhs,some_big_object& rhs);
class X {
private:
//目标对象
some_big_object some_detail;
std::mutex m;
public:
X(some_big_object const& sd):some_detail(sd){};
friend void swap(X& lhs,X&rhs)
{
if(&lhs==&rhs)
return;
//锁住两个互斥变量
std::lock(lhs.m,rhs.m);
//表示 std::lock_guard 对象可获取锁之外,还将锁交由 std::lock_guard 对象管理,而不需要std::lock_guard 对象再去构建新的锁。保证退出时胡吃两能被正确的解析。
std::lock_guard<std::mutex> lock_a(lhs.m,std::adopt_lock);
std::lock_guard<std::mutex> lock_b(rhs.m,sth::adopt_lock);
swap(lhs.some_detail,rhs.some_detail);
}
};
3.2.5 避免死锁的进阶指导
避免相关线程发生死锁的建议:
- 避免嵌套锁:当前线程已经取得锁时,在未解锁前,不获取新锁。
- 避免在持有锁的时候调用用户提供的代码,用户行为很容易产生未定义行为。
- 使用固定顺序获取锁:当线程需要多个资源配合完成,而不得不使用多个锁时,尽量将锁按照顺序执行,避免死锁。在遍历需要获取多个锁的时候,必须按照固定顺序得到多个相关锁。每个线程的遍历次序必须相同。
- 使用锁的层次结构:提供对于运行时鱼等是否被坚持的检查。
//使用层次锁来避免死锁
//层级锁,层级为10000
hierarchical_mutex high_level_mutex(10000);
//层级锁,层级为5000
hierarchical_mutex high_level_mutex(5000);
int do_low_level_stuff();
int low_level_func()
{
//层级锁互斥
std::lock_guard<hierarchical_mutex> lk(low_level_mutex);
return do_low_level_stuff();
}
void high_level_stuff(int some_param);
void high_level_func()
{
//让hight_level_mutex上锁
std::lock_guard<hierarchical_mutex> lk(high_level_mutex);
//调用low_level_func()会对low_level_mutex上锁
high_level_stuff(low_level_func());
}
//线程a遵守层级规则,所以运行灭有问题
void thread_a()
{
high_level_func();
}
hierarchical_mutex other_mutex(100);
void do_other_stuff();
void other_stuff()
{
high_level_func();
do_other_stuff();
}
//线程b无视层级规则
void thread_b()
{
//先锁住other_mutex;它的层级只有100,意味着低层级已经被保护,再使用high_level_func(),会造成此hierarchical_mutex将会产生一个错误。导致程序意外终止
std::lock_guard<hierarchical_mutex> lk(other_mutex);
other_stuff();
}
简单层级的互斥实现
class hierarchical_mutex
{
//互斥信号量
std::mutex internal_mutex;
//接受的层级值
unsigned long const hierarchical_value;
//原来的层级值
unsigned long previous_hierarchy_value;
//静态指针,指向线程的层级值
static thread_local unsigned long this_thread_hierarchy_value;
void check_for_hierarchy_violation()
{
//检查层级值保持递减的序列
if(this_thread_hierarchy_value<=hierarchical_value)
{
throw std::logic_error(“mutex hierarchy violated”);
}
}
void update_hierachy_value()
{
//更改层级值前,先将原来的层级值保存
previous_hierarchy_value=this_thread_hierarchy_value;
//更改当前的层级值
this_thread_hierarchy_value=hierarchical_value;
}
public:
explicit hierarchical_mutex(unsigned long value):hierarchical_value(value),previous_hierarchy_value(0)
{}
~hierarchical_mutex();
//加锁函数
void lock()
{
//确认当前值小于新值
check_for_hierarchy_violation();
//当前线程加锁
internal_mutex.lock();
update_hierachy_value();
update_hierachy_value();
}
void unlock()
{
//还原原来的层级值
this_thread_hierarchy_value=previous_hierarchy_value;
internal_mutex.unlock();
}
bool try_lock()
{
check_for_hierarchy_violation();
if(!internal_mutex.try_lock())
{
return false;
}
update_hierachy_value();
return true;
}
};
//直接将信号变量,初始化为最大值
thread_local unsigned long hierarchical_mutex::this_thread_hierarchy_value(ULONG_MAX);
3.2.6 std::unique_lock– 灵活的锁
std::unique_lock可以根据传入的第二个参数的不同,对析构函数进行管理,使用std::defer_lock作为参数的时候,表明互斥量应该保持解锁状态,方便被其它线程加锁。但是 std::unique_lock会占用比较多的空间,并且比std::lock_guard稍慢一些。并且std::unique_lock实例不带互斥量:信息一倍存储,且被更新。
std::lock()和std::unique_lock的使用
class some_big_object;
void swap(some_big_object& lhs,some_big_object& rhs);
class X
{
private:
some_big_object some_detail;
std::mutex m;
public:
X(some_big_object const& sd):some_detail(sd){}
friend void swap(X& lhs, X& rhs)
{
if(&lhs==&rhs)
return;
//std::def_lock 留下未上锁的互斥量
std::unique_lock<std::mutex> lock_a(lhs.m,std::defer_lock);
std::unique_lock<std::mutex> lock_b(rhs.m,std::defer_lock);
// 互斥量在这里上锁
std::lock(lock_a,lock_b);
swap(lhs.some_detail,rhs.some_detail);
}
};
3.2.7 不同域中互斥量所有权的传递
允许一个函数去锁住一个互斥量,并且将所有权移到调用者上,所以调用者可以在这个锁保护的范围内执行额外的动作。
下面的程序片段展示了:函数get_lock()锁住了互斥量,然后准备数据,返回锁的调用函数:
std::unique_lock<std::mutex> get_lock()
{
extern std::mutex some_mutex;
std::unique_lock<std::mutex> lk(some_mutex);
prepare_data();
//声明自动变量,不需要调用`std::move()`直接返回信号量的锁
return lk;
}
void process_data()
{
//获取线程的信号量锁转移std::unique_lock实例的所有权
std::unique_lock<std::mutex> lk(get_lock());
do_something();
}
3.2.8 锁的粒度
锁的粒度通常用来描述通过一个锁保护着的数据量的大小。细粒度保护较小的数据,粗粒度保护较多的数据。在操作过程中,自己要注意锁的粒度问题。
3.3 保护共享数据的替代设施
除了互斥量之外,还有其它的保护共享数据的方式。C++提供了一种纯粹保护共享数据初始化过程的机制。
使用一个互斥量的延迟初始化(线程安全)过程
std::shared_ptr<some_resource> resource_ptr;
std::mutex resource_mutex;
void foo()
{
//所有线程在此序列化
std::unique_lock<std::mutex> lk(resource_mutex);
if(!resource_ptr)
{
//初始化资源
resource_ptr.reset(new some_resource);
}
lk.unlock()
//执行操作
resource_ptr->do_something();
}
c++ 提供了 std::once_flag 和 std::call_once 来处理多线程的读写同步问题。比起锁住互斥量,并显式的检查指针,每个线程只需要使用std::call_once ,在std::call_once的结束时,就能安全的知道指针已经被其他的线程初始化了。使用std::call_once比显式使用互斥量消耗的资源更少,特别是当初始化完成后。下面是一个使用示例:
std::shared_ptr<some_resource> resource_ptr;
std::once_flag resource_flag;
void init_resource()
{
resource_ptr.reset(new some_resource);
}
void foo()
{
//可以完整的进行一次初始化
std::call_once(resource_flag,init_resource);
resource_ptr->do_something();
}
使用 std::call_once 作为类成员的延迟初始化(线程安全)
class X
{
private:
connection_info connection_details;
connection_handle connection;
std::once_flag connection_init_flag;
//打开数据库
void open_connection()
{
connection=connection_manager.open(connection_details);
}
public:
X(connection_info const& connection_details_):connection_details(connection_details_)
{}
//完成线程的初始化
void send_data(data_packet const& data)
{
std::call_once(connection_init_flag,&X::open_connection,this);
connection.send_data(data);
}
//接受数据,返回数据包
data_packet receive_data()
{
//传递一个额外的参数,完成这个操作
std::call_once(connection_init_flag,&X::open_connection,this);
return connection.receive_data();
}
};
3.3.2 保护很少更新的数据结构
类似于DNS域名缓存表,在boost库中也存在缓存可以被多个线程访问,并且每次更新的都是少数数据。可以使用boost::share_mutex来进行同步。
使用 boost::shared_mutex 对数据结构进行保护的简单DNS缓存
#include <map>
#include <string>
#include <mutex>
#include <boost/thread/shared_mutex.hpp>
class dns_entry;
class dns_cache
{
//DNS缓冲表
std::map<std::string,dns_entry> entries;
mutable boost::shared_mutex entry_mutex;
public:
dns_entry find_entry(std::string const& domain) const
{
//创建共享锁
boost::shared_lock<boost::shared_mutex> lk(entry_mutex);
//获取查找结果迭代器
std::map<std::string,dns_entry>::const_iterator const it=entries.find(domain);
return (it==entries.end())?dns_entry():it->second;
}
void update_or_add_entry(std::string const& domain,
dns_entry const& dns_details)
{
//线程独占锁,会阻止其它线程对数据结构进行修改,并阻止线程调用find_entry()
std::lock_guard<boost::shared_mutex> lk(entry_mutex);
entries[domain]=dns_details;
}
}
3.3.3 嵌套锁
C++ 标准库提供了std::recursive_mutex类。其功能与std::mutex类似,除了你可以从同一线程的单个实例上获取多个锁。互斥量锁住其他线程前,你必须释放你拥有的所有锁,所以当你调用lock()三次时,你也必须调用unlock()三次。正确使用std::lock_guard<std::recursive_mutex>和std::unique_lock<std::recursive_mutex>可以帮你处理这些问题。主要用于成员函数嵌套调用的时候的互斥。
推荐的使用方式是:提取处一个函数作为类的私有成员,并且让其它成员函数都进行调用,这个私有成员函数不会对互斥量进行上锁。