2019-07-11 20:09:48
第6章 基于锁的并发数据结构设计
6.1 并发设计的意义
同过合理设计互斥量,让多个线程可以并发的访问这个数据,线程可以对这个数据结构做相同或者不同的操作。
序列化(serialzation):线程轮流访问被保护的数据。这其实是对数据进行串行的访问,而非并发。
一般进行并发数据结构设计的思路都是:减少保护区域,减少序列化操作,就能提升并发访问的潜力。
6.1.1 数据结构并发设计的指导与建议(指南)
数据结构线程安全条件:
- 确保无线程能够看到,数据结构的“不变量”破坏时的状态。
- 小心那些会引起条件竞争的接口,提供完整操作的函数,而非操作步骤。
- 注意数据结构的行为是否会产生异常,从而确保“不变量”的状态稳定。
- 将死锁的概率降到最低。使用数据结构时,需要限制锁的范围,且避免嵌套锁的存在。
需要考虑的问题:
- 锁的范围中的操作,是否允许在锁外执行?
- 数据结构中不同的区域是否能被不同的互斥量所保护?
- 所有操作都需要同级互斥量保护吗?
- 能否对数据结构进行简单的修改,以增加并发访问的概率,且不影响操作语义?
6.2 基于锁的并发数据结构
基于锁的并发数据结构设计,核心在于 保证程序安全的情况下,保证线程持有锁的时间最短。
线程安全的stack和queue示例,第三、四章中,在此不做过多叙述
6.2.3 线程安全队列——使用细粒度锁和条件变量
首先先看一个单线程的队列:
template<typename T>
class queue
{
private:
struct node
{
T data;
std::unique_ptr<node> next;
node(T data_);
data_(std::move(data_))
{}
};
//头部指针
std::unique_ptr<node> head;
//队尾部指针
node* tail;
public:
queue(){}
queue(const queue& other)=delete;
queue& operator=(const queue& other)=delete;
std::shared_ptr<T> try_pop()
{
if(!head){
return std::shared_ptr<T>();
}
std::shared_ptr<T> const res(std::make_shared<T>(std::move(head->data)));
std::unique_ptr<node> const old_head=std::move(head);
//将head指针指向下一个
head=std::move(old_head->next);
return res;
}
//尾部插入
void push(T new_value)
{
std::unique_ptr<node> p(new node(std::move(new_value)));
node* const new_tail=p.get();
if(tail)
{
tail->next=std::move(p);
}else{
head=std::move(p);
}
tail=new_tail;
}
}
这里可以看到,单线程情况下,基本使用良好,但是对于多线程而言,在push和pop中没有对头尾指针添加保护锁,同时,为了防止在队列只有一个元素时的时候,head==tail;所以push和try_pop间接访问了这个头尾指针,因此需要对tail添加保护锁。 不过这里使用更简便的方法,减少锁的使用:预分配一个空节点,永远指向队列尾部,这样避免了头尾指针能够被间接访问。但是使用了一个间接层次的指针数据作为虚拟节点。
更改完成时候,在push操作中只用考虑尾部指针tail在pop函数中虽然可以访问tail但是tail只在最初阶段进行比较,更多需要考虑head。同时,添加虚拟节点意味着pop和push不能同时对同一个节点进行操作。
最终,除了操作的元素外需要上锁外,push只对tail上锁,try_pop,先对head上锁,一旦被改变之后就不再加锁。
最终结果:
线程安全队列–细粒度锁版
template <typename T>
class threadsafe_queue
{
private:
struct node
{
std::shared_ptr<T> data;
std::shared_ptr<node> next;
};
//头部节点
std::unique_ptr<node> head;
//尾部节点
node* tail;
//头部互斥保护
std::mutex head_mutex;
//尾部信号量
std::mutex tail_mutex;
public:
threadsafe_queue():head(new node),tail(head.get){}
~threadsafe_queue();
threadsafe_queue(const threadsafe_queue& other)=delete;
threadsafe_queue& operator=(const threadsafe_queue& other)=delete;
node* get_tail()
{
std::lock_guard<std::mutex> tail_lock(tail_mutex);
return tail;
}
std::unique_ptr<node> pop_head()
{
std::lock_guard<std::mutex> head_lock(head_mutex);
//使用git_tail 保护尾部指针一次
if(head.get()==get_tail()){
return nullptr;
}
std::unique_ptr<node> old_head=std::move(head);
head=std::move(old_head->next);
return old_head;
}
void push(T new_value)
{
std::shared_ptr<T> new_data(std::make_shared<T>(std::move(new_value)));
std::unique_ptr<node> p(new node);
const* const new_tail=p.get();
//tail 加锁
std::lock_guard<std::mutex> tail_lock(tail_mutex);
tail->data=new_value;
tail->next=std::move(p);
tail=new_tail;
}
std::shared_ptr<T> try_pop()
{
std::unique_ptr<node> old_head=pop_head();
return old_head?old_head->data:std::shared_ptr<T>();
}
};
在此基础之上添加,可上锁和等待的线程安全队列;但是由于wait_and_pop等操作会降低程序的性能。
template<typename T>
class threadsafe_queue
{
private:
struct node
{
std::shared_ptr<T> data;
std::unique_ptr<node> next;
};
std::mutex head_mutex;
std::unique_ptr<node> head;
std::mutex tail_mutex;
node* tail;
//环境信号变量
std::condition_variable data_cond;
public:
threadsafe_queue():head(new node),tail(head.get()){}
threadsafe_queue(const threadsafe_queue& other)=delete;
threadsafe_queue& operator=(const threadsafe_queue& other)=delete;
node* get_tail()
{
std::lock_guard<std::mutex> tail_lock(tail_mutex);
return tail;
}
std::unique_ptr<node> pop_head()
{
std::unique_ptr<node> old_head=std::move(head);
head=std::move(old_head->next);
return old_head;
}
//数据等待线程锁
std::unique_ptr<std::mutex> wait_for_data()
{
std::unique_lock<std::mutex> head_lock(head_mutex);
//等待环境唤醒
data_cond.wait(head_lock,[&]{return head.get()!=get_tail();});
//将锁的实例,返回给调用者
return std::move(head_lock);
}
std::unique_ptr<node> wait_pop_head()
{
//添加数据等待线程锁
std::unique_lock<std::mutex> head_lock(wait_for_data());
return pop_head();
}
std::unique_ptr<node> wait_pop_head(T& value)
{
std::unique_lock<std::mutex> head_lock(wait_for_data());
//获取头部数据
value=std::move(*head->data);
return pop_head();
}
void wait_and_pop(T& value)
{
std::unique_ptr<node> const old_head=wait_pop_head(value);
}
//试着拿出头部
std::unique_ptr<node> try_pop_head()
{
std::lock_guard<std::mutex> head_lock(head_mutex);
if(head.get()==get_tail())
{
return std::unique_ptr<node>();
}
return pop_head();
}
std::unique_ptr<node> try_pop_head(T& value)
{
std::lock_guard<std::mutex> head_lock(head_mutex);
if(head.get()==get_tail())
{
return std::unique_ptr<node>();
}
value=std::move(*head->data);
return pop_head();
}
std::shared_ptr<T> try_pop();
bool try_pop(T& value);
std::shared_ptr<T> wait_and_pop();
void wait_and_pop(T& value);
void push(T new_value);
bool empty();
};
//推入新节点
template<T>
void threadsafe_queue<T>::push(T new_data)
{
std::shared_ptr new_data(std::make_shared<T>(std::move(new_value)));
std::unique_ptr<node> p(new node);
{
//尾部加锁
std::lock_guard<std::mutex> tail_lock(tail_mutex);
tail->data=new_data;
node* new_tail=p.get();
tail->next=std::move(p);
tail=new_tail;
}
//发射环境信号
data_cond.notify_one();
}
//线程安全队列
template<T>
std::shared_ptr<T> threadsafe_queue<T>::wait_and_pop()
{
std::unique_ptr<node> const old_head=wait_pop_head();
return old_head->data;
}
template<T>
void threadsafe_queue<T>::wait_and_pop(T& value)
{
//传递值,然后返回取出的头部
std::unique_ptr<node> const old_head=wait_pop_head(value);
}
template<T>
std::shared_ptr threadsafe_queue<T>::try_pop()
{
std::unique_ptr<node> old_head=try_pop_head();
return old_head?old_head->data:std::shared_ptr<T>();
}
template<T>
bool threadsafe_queue<T>::try_pop(T& value)
{
std::unique_ptr<node> old_head=try_pop_head(value);
return old_head;
}
template<T>
bool empty()
{
std::lock_guard<std::mutex> head_lock(head_mutex);
return (head.get()==get_tail());
}
6.3 基于锁设计更加复杂的数据结构
这里主要以定义一个简单的线程安全查询表和链表为例,进行工作
6.3.1 一个线程安全的查询表
首先明确查询表的基本操作有:
- 添加一队“键值-数据”
- 修改指定键值所对应的数据
- 删除一组值
- 通过给定键值,获取对应数据
std::map椎间盘美好常见的关联容器和比较
- 二叉树;比如:红黑树:并不会提高对高并发的访问,每一个都要访问根节点,根节点需要时常上锁
- 有序数组:是最坏的选择,无法提前感知那个有序
- 哈希表:结合桶,对每个桶进行互斥加锁,提高并发性能。
//定义模板:关键字、值、hash映射
template<typename Key,typename Value,typename Hash=std::hash<Key> >
class threadsafe_lookup_table
{
private:
//定义桶的基本类型
class bucket_type
{
private:
//设置键值对基本类型
typedef std::pair<Key,Value> bucket_value;
//设置键值队列表
typedef std::list<bucket_value> bucket_data;
//定义列表迭代器
typedef typename bucket_data::iterator bucket_iterator;
//定义桶中的数据列表
bucket_data data;
//桶的互斥信号变量
mutable boost::shared_mutex mutex;
//通过关键字查找迭代器
bucket_iterator find_entry_for(Key const& key) const
{
return std::find_if(data.begin(),
data.end(),
[&](bucket_value const& item){return item.first==key;}
);
}
public:
//通过引入的方式,查找数据
Value value_for(Key const& key,Value const& default_value) const
{
boost::shared_lock<boost::shared_mutex> lock(mutex);
bucket_iterator const found_entry=find_entry_for(key);
//返回查找的关键值
return (found_entry==data.end())?default_value:found_entry->second;
}
//更新键值对
void add_or_update_mapping(Key const& key,Value const& value)
{
std::unique_lock<boost::shared_mutex> lock(mutex);
bucket_iterator const found_entry=find_entry_for(key);
if(found_entry==data.end())
{
data.push_back(bucket_value(key,value));
}else{
found_entry->second=value;
}
}
//移除关键字
void remove_mapping(Key const& key)
{
std::unique_lock<boost::shared_mutex> lock(mutex);
bucket_iterator const found_entry=find_entry_for(key);
if(found_entry!=data.end())
{
data.erase(found_entry);
}
}
};
//end define bucket_type
//定义查询的基本桶向量容器
std::vector<std::unique_ptr<bucket_type> > buckets;
//hash映射表
Hash hasher;
//根据关键字查找桶
bucket_type& get_bucket(Key const& key) const
{
std::size_t const bucket_index=hasher(key)%buckets.size();
return *buckets[bucket_index];
}
//公共的类接口
public:
//定义关键字类型
typedef Key key_type;
//定义映射的值
typedef Value mapped_type;
//定义hash函数
typedef Hash hash_type;
//基本的构造函数
threadsafe_lookup_table(unsigned num_buckets=19,
Hash const& hasher_=Hash()):
buckets(num_buckets),
hasher(hasher_)
{
for(unsigned i=0;i<num_buckets;++i)
{
buckets[i].reset(new bucket_type);
}
}
threadsafe_lookup_table(threadsafe_lookup_table const& other)=delete;
threadsafe_lookup_table& operator=(threadsafe_lookup_table const& other)=delete;
//根据关键字查找值
Value value_for(Key const& key,
Value const& default_value=Value()) const
{
return get_bucket(key).value_for(key,default_value);
}
void add_or_update_mapping(Key const& key,Value const& value)
{
get_bucket(key).add_or_update_mapping(key,value);
}
void remove_mapping(Key const& key)
{
get_bucket(key).remove_mapping(key);
}
};
6.3.2 编写一个使用锁的线程安全链表
链表的基本功能:
链表的基本操作
- 向列表添加一个元素
- 当某个条件满足时,就从链表中删除某个元素
- 当某个条件满足时,从链表中查找某个元素
- 当某个条件满足时,更新链表中的某个元素
- 将当前容器中链表中的每个元素,复制到另一个容器中
线程安全的迭代器
//定义模板类
template<typename T>
class threadsafe_list
{
//链表数据节点
struct node
{
std::mutex m;
std::shared_ptr<T> data;
std::unique_ptr<node> next;
//构造函数
node():next(){}
//数值构造函数
node(T const& value):data(std::make_shared<T>(value)){}
};
//定义头部节点
node head;
public:
threadsafe_list(){}
~threadsafe_list()
{
remove_if([](node const&){return true;});
}
threadsafe_list(threadsafe_list const& other)=delete;
threadsafe_list& operator=(threadsafe_list const& other)=delete;
//从头部插入
void push_front(T const& value)
{
//创建新节点
std::unique_ptr<node> new_node(new node(value));
//头部节点加锁
std::lock_guard<std::mutex> lk(head.m);
new_node->next=std::move(head.next);
head.next=std::move(new_node);
}
//定义迭代函数
template<typename Function>
void for_each(Function f)
{
node* current=&head;
std::unique_lock<std::mutex> lk(head.m);
//便利链表
while(node* const next=current->next.get())
{
//保护下一个节点数据
std::unique_lock<std::mutex> next_lk(next->m);
//上一个节点解锁
lk.unlock();
//执行函数
f(*next->data);
//更改当前指针
current=next;
//移动对象
lk=std::move(next_lk);
}
}
//查找一个条件的元素
//定义查找关键函数模板
template<typename Predicate>
std::shared_ptr<T> find_first_if(Predicate p)
{
node* current=&head;
std::unique_lock<std::mutex> lk(head.m);
while(node* const next=current->next.get())
{
std::unique_lock<std::mutex> next_lk(next->m);
lk.unlock();
if(p(*next->data))
{
return next->data;
}
current=next;
lk=std::move(next_lk);
}
return std::shared_ptr<T>();
}
//按照条件删除元素
template<typename Predicate>
void remove_if(Predicate p)
{
node* current=&head;
std::unique_lock<std::mutex> lk(head.m);
while(node* const next=current->next.get())
{
std::unique_lock<std::mutex> next_lk(next->m);
//是否符合查找条件
if(p(*next->data))
{
std::unique_ptr<node> old_next=std::move(current->next);
current->next=std::move(next->next);
next_lk.unlock();
}else{
//解锁下一个
lk.unlock();
//移动当前指针
current=next;
//移动下一个锁
lk=std::move(next_lk);
}
}
}
};
第7章 无锁并发数据结构设计
7.1 定义和意义
使用互斥量、条件变量,以及“期望”来同步阻塞数据的算法和数据结构。
无锁数据结构:作为无锁结构,就意味着线程可以并发的访问这个数据结构。但是一般,这样的线程不能做相同的操作,并且在无锁算法中的循环会让一些线程处于”饥饿”状态。 无等待数据结构:首先,是无锁数据结构;并且,每个线程都能在有限的步数内完成操作,暂且不管其他线程是如何工作的。
活锁:活锁的产生是,两个线程同时尝试修改数据结构,但每个线程所做的修改操作都会让另一个线程重启,所以两个线程就会陷入循环,多次的尝试完成自己的操作。
这就是“无锁-无等待”代码的缺点:虽然提高了并发访问的能力,减少了单个线程的等待时间,但是其可能会将整体性能拉低。
7.2 无锁数据结构的例子
一个简单的线程安全栈结构
template <typename T>
class lock_free_stack
{
struct node
{
//获取指针数据
std::shared_ptr<T> data;
node* next;
node(T const& data_):data(std::make_shared<T>(data_)){}
};
std::atomic<node*> head;
public:
lock_free_stack();
~lock_free_stack();
//push函数
void push(T const& data)
{
node* const new_node=new node(data);
//加载数据
new_node->next=head.load();
//用原子操作替换节点
while(!head.compare_exchange_weak(new_node->next,new_node));
}
std::shared_ptr<T> pop(T& result)
{
node* old_head=head.load();
//使用原子操作替换节点
while(old_head&&!head.compare_exchange_weak(old_head,old_head->next));
//返回指针值
return old_head?old_head->data:std::shared_ptr<T>();
}
};
7.2.2 停止内存泄露:使用无锁数据结构管理内存
可以添加原子变量让栈变为线程安全的栈,同时添加引用计数,帮助
template<typename T>
class lock_free_stack
{
private:
//原子变量
std::atomic<unsigned> threads_in_pop;
void try_reclaim(node* old_head);
public:
std::shared_ptr<T> pop()
{
//在做事之前,计数值加1
++threads_in_pop;
node* old_head=head.load();
while(old_head&&!head.compare_exchange_weak(old_head,old_head->next));
std::shared_ptr<T> res;
if(old_head)
{
//回收删除的节点
res.swap(old_head->data);
}
//从节点中直接提取数据,而非拷贝指针
try_reclaim(old_head);
return res;
}
}
采用引用计数的回收机制
template<typename T>
class lock_free_stack
{
private:
//即将被删除的数
std::atomic<node*> to_be_deleted;
static void delete_nodes(node* nodes)
{
while(nodes)
{
node* next=nodes->next;
delete nodes;
nodes=next;
}
}
//删除头部节点
void try_reclaim(node* old_head)
{
//是否为第一次删除
if(threads_in_pop==1)
{
//声明 “可删除”列表
node* nodes_to_delete=to_be_deleted.exchange(nullptr);
//是否只有一个线程调用pop
if(!--threads_in_pop)
{
delete_nodes(nodes_to_delete);
}else if(nodes_to_delete)
{
chain_pending_nodes(nodes_to_delete)
}
//删除节点
delete old_head;
}else{
chain_pending_nodes(old_head);
--threads_in_pop;
}
}
void chain_pending_nodes(node* nodes)
{
node* last=nodes;
//让next指针指向链表的末尾
while(node* const next=last->next) {
last=next;
}
chain_pending_nodes(nodes,last);
}
void chain_pending_nodes(node* first,node* last)
{
//last标记为即将删除
last->next=to_be_deleted;
//用循环来保证last->next的正确性
while(!to_be_deleted.compare_exchange_weak(last->next,first));
}
void chain_pending_node(node* n)
{
chain_pending_nodes(n,n);
}
7.2.3 检测使用风险指针(不可回收)的节点
风险指针 :当有线程去访问要被(其他线程)删除的对象时,会先设置对这个对象设置一个风险指针,而后通知其他线程,删除这个指针是一个危险的行为。一旦这个对象不再被需要,那么就可以清除风险指针了。
利用风险指针实现pop操作
std::shared_ptr<T> pop()
{
//获取风险指针
std::atomic<void*>& hp=get_hazard_pointer_for_current_thread();
node* old_head=head.load();
//比较交换操作失败,则重置操作1
do
{
node* temp;
// 1 直到将风险指针设为head指针
do
{
temp=old_head;
hp.store(old_head);
old_head=head.load();
}while(old_head!=temp);
//检查head==old_head?head=old_head->next:head=old_head;
}while(old_head&&!head.compare_exchange_strong(old_head,old_head->next));
// 2 当声明完成,清除风险指针
hp.store(nullptr);
std::shared_ptr<T> res;
if(old_head)
{
res.swap(old_head->data);
// 3 在删除之前对风险指针引用的节点进行检查
if(outstanding_hazard_pointers_for(old_head))
{
//将其放在链表中,之后进行回收
reclaim_later(old_head);
}else{
delete old_head;
}
//检查并删除风险节点
delete_nodes_with_no_hazards();
}
return res;
}
get_hazard_pointer_for_current_thread()函数的简单实现
unsigned const max_hazard_pointers=100;
struct hazard_pointer
{
std::atomic<std::thread::id> id;
std::atomic<void*> pointer;
};
//异常节点数组
hazard_pointer hazard_pointers[max_hazard_pointers];
class hp_owner
{
hazard_pointer* hp;
public:
hp_owner(hp_owner const&)=delete;
hp_owner operator=(hp_owner const&)=delete;
hp_owner():hp(nullptr)
{
for(unsigned i=0;i<max_hazard_pointers;++i)
{
std::thread::id old_id;
//检查old_id是否含有hazard_pointers中的异常指针
if(hazard_pointers[i].id.compare_exchange_strong(old_id.std::thread::get_id()))
{
//如果含有则hp指向该异常指针,
hp=&hazard_pointers[i];
break;
}
}
//如果不含有风险指针就抛出异常
if(!p)
{
throw std::runtime_error("No hazard pointer available");
}
}
std::atomic<void *>&get_pointer
{
return hp->pointer;
}
~hp_owner()
{
hp->pointer.store(nullptr);
hp->id.store(std::thread::id());
}
};
//获取当前的风险指针
std::atomic<void *>& get_hazard_pointer_for_current_thread()
{
//每个线程都有自己的风险指针
thread_local static hp_owner hazard;
//获取指针数目
return hazard.get_pointer();
}
//搜索风险表,查找对应记录
bool outstanding_hazard_pointers_for(void* p)
{
for(unsigned i=0;i<max_hazard_pointers;++i)
{
if(hazard_pointers[i].pointer.load()==p){
return true;
}
}
return false;
}
//风险指针的回收函数
template<typename T>
void do_delete(void* p)
{
delete static_cast<T*>(p);
}
//删除缓冲队列
struct data_to_reclaim
{
void* data;
std::Function<void(void* )> deleter;
data_to_reclaim* next;
template<typename T>
//删除缓冲链中元素
data_to_reclaim(T* p):data(p),deleter(&do_delete<T>),next(0){}
~data_to_reclaim()
{
deleter(data);
}
};
//定义释放节点
std::atomic<data_to_reclaim*> nodes_to_reclaim;
//头插法将数据插入
void add_to_reclaim_list(data_to_reclaim* node)
{
//指针指向下一个
node->next=nodes_to_reclaim.load();
//将数据节点与head相交换,因此最终插入到头结点之后
while(!nodes_to_reclaim.compare_exchange_weak(node->next,node));
}
//创建相关实例,将数据添加到待删除队列
template<typename T>
void reclaim_later(T* data)
{
add_to_reclaim_list(new data_to_reclaim(data));
}
//删除相关指针,将已经声明的链表节点进行回收
void delete_nodes_with_no_hazards()
{
data_to_reclaim* current=nodes_to_reclaim.exchange(nullptr);
//当节点不为空的时候
while(current)
{
data_to_reclaim* const next=current->next;
//判断节点是否属于风险指针
if(!outstanding_hazard_pointers_for(current->data))
{
//没有指针就安全删除
delete current;
}else{
//是风险指针就把节点添加到链表的后面,再统一删除
add_to_reclaim_list(current);
}
current=next;
}
}
7.2.4 检测使用引用计数的节点
通过增加外部引用计数,保证指针在访问期间的合法性。
分离计数方式的无锁栈
template<typename T>
class lock_free_stack
{
private:
struct node;
//指向下一个指针的节点
struct counted_node_ptr
{
//外部引用计数
int external_count;
node* ptr;
};
struct node
{
std::shared_ptr<T> data;
//节点的内部引用计数
std::atomic<int> internal_count;
//下一个指针节点
counted_node_ptr next;
node(T const& data):data(std::make_shared<T>(data_)),internal_count(0)
{
}
};
//头部节点,它只有引用指针和计数,数据直接是node
std::atomic<counted_node_ptr> head;
//增加头部的引用计数
void increase_head_count(counted_node_ptr& old_counter)
{
//创建新的计数指针
counted_node_ptr new_counter;
do{
//new_counter指向新的指针
new_counter=old_counter;
//增加外部引用计数
++new_counter.external_count;
//循环直到,old_counter指向头部,head指向new_counter;
}while(!head.compare_exchange_strong(old_counter,new_counter));
//修改指针的外部引用次数,每被引用一次,计数+1
old_counter.external_count=new_counter.external_count;
}
public:
~lock_free_stack()
{
while(pop());
}
//添加函数
void push(T const& data)
{
//新的下一个指针
counted_node_ptr new_node;
new_node.ptr=new node(data);
new_node.external_count=1;
//新节点的下一个节点指向,old head
new_node.ptr->next=head.load();
//便利指针,直到new_node.ptr的下一个指针是head;即现在最前面的指针是new_node,将head指针指向new_node;
while(!head.compare_exchange_weak(new_node.ptr->next,new_node));
}
//pop弹出函数
std::shared_ptr<T> pop()
{
counted_node_ptr old_head=head.load();
for(;;)
{
increase_head_count(old_head);
//获取头部数据指针
node* const ptr=old_head.ptr;
//如果是一个空指针
if(!ptr)
{
return std::shared_ptr<T>();
}
//将head指针后移
if(head.compare_exchange_strong(old_head,ptr->next))
{
//返回指针数据
std::shared_ptr<T> res;
res.swap(ptr->data);
//取出节点后,头部节点的引用计数-2
int const count_increase=old_head.external_count-2;
//如果现在的内部引用计数为0
if(ptr->internal_count.fetch_add(count_increase)==-count_increase)
{
//直接删除指针
delete ptr;
}
return res;
//如果指针的内部引用计数为2
}else if(ptr->internal_count.fetch_sub(1)==1){
//删除指针
delete ptr;
}
}
}
};
7.2.5 应用于无锁栈上的内存模型
对于不同的多线程相互数据,在修改内存之前,需要检查一下操作之间的依赖关系。然后再去确定适合这种需求关系的最小内存。
对于push操作,接受数据之后,先构造节点,再插入队列–设置head,因此push中的唯一原子操作就是compare_exchange_weak()函数,对于同push()操作没有必要考虑,它需要和pop()之中的head.compare_exchange_strong有严格的内存顺序。
对于pop()操作,必须在访问next值之前使用std::memory_order_acquire或者更加严格的内存操作顺序,保证next指针指向的内容不被改变。因为在increase_head_count()中使用compare_exchange_strong()就获取next指针指向的旧值。因此在交换成功的时候必须使用严格内存序,但是当交换失败时,因为只涉及到内部操作,因此可以使用松散内存序。然后循环直到交换成功。
基于引用计数和松散原子操作的无锁线程
class lock_free_stack
{
private:
struct node;
struct counted_node_ptr
{
int external_count;
node* ptr;
};
struct node
{
node(T const& data_):
data(std::make_shared<T>(data_)),
internal_count(0)
{}
std::shared_ptr<T> data;
std::atomic<int> internal_count;
counted_node_ptr next;
};
std::atomic<counted_node_ptr> head;
void increase_head_count(counted_node_ptr& old_counter)
{
counted_node_ptr new_counter;
do
{
new_counter=old_counter;
++new_counter.external_count;
}while(!head.compare_exchange_strong(
old_counter,
new_counter,
std::memory_order_acquire,
std::memory_order_relaxed
));
old_counter.external_count=new_counter.external_count;
}
public:
~lock_free_stack()
{
while(pop());
}
void push(T const& data)
{
counted_node_ptr new_node;
new_node.ptr=new node(data);
new_node.external_count=1;
//加载head数据
new_node.ptr->next=head.load(std::memory_order_relaxed)
while(!head.compare_exchange_weak(
new_node.ptr->next,
new_node,
//这里必须要和increase_head_count的compare_exchange_strong中成功时有序
std::memory_order_release,
std::memory_order_relaxed
));
}
std::shared_ptr<T> pop()
{
//加载头部指针,因为这里的载入没有强制的竞争行为,所以可以是relaxed的
counted_node_ptr old_head=head.load(std::memory_order_relaxed);
for(;;)
{
increase_head_count(old_head);
node* const ptr=old_head.ptr;
if(!ptr)
{
return std::shared_ptr<T>();
}
if(head.compare_exchange_strong(old_head,ptr->next,std::memory_order_relaxed))
{
std::shared_ptr<T> res;
res.swap(ptr->data);
int const count_increase=old_head.external_count-2;
if(ptr->internal_count.fetch_add(count_increase,std::memory_order_release)==-count_increase)
{
delete ptr;
}
return res;
}else if(
ptr->internal_count.fetch_add(-1,std::memory_order_relaxed)==1
)
{
ptr->internal_count.load(std::memory_order_acquire);
delete ptr;
}
}
}
};
7.2.6 写一个无锁的线程安全队列
先看一个简单的生产者/单消费者模型下的无锁队列
template<typename T>
class lock_free_queue
{
private:
struct node
{
std::shared_ptr<T> data;
node* next;
node():next(nullptr)
{}
};
std::atomic<node*> head;
std::atomic<node*> tail;
node* pop_head()
{
node* const old_head=head.load();
if(old_head==tail.load())
{
return nullptr;
}
head.store(old_head->next);
return old_head;
}
public:
lock_free_queue():head(new node),tail(head.load())
{}
lock_free_queue(const lock_free_queue& other)=delete;
lock_free_queue& operator=(const lock_free_queue& other)=delete;
~lock_free_queue()
{
while(node* const old_head=head.load())
{
head.store(old_head->next);
delete old_head;
}
}
std::shared_ptr<T> pop()
{
//获取头节点
node* old_head=pop_head();
if(!old_head)
{
return std::shared_ptr<T>();
}
//获取头部数据
std::shared_ptr<T> const res(old_head->data);
delete old_head;
//返回头部数据
return res;
}
void push(T new_value)
{
std::shared_ptr<T> new_data(std::make_shared<T>(new_value));
node* p=new node;
//获取尾部节点
node* const old_tail=tail.load();
//将尾部数据和新指针交换
old_tail->data.swap(new_data);
//更换尾部数据
old_tail->next=p;
//尾指针存储p
tail.store(p);
}
};
对于线程安全的队列而言,需要注意的地方是在尾部节点插入的地方和头部节点删除的地方,可以借鉴内外部的引用计数的方法,在删除和添加操作中,使用原子操作,避免线程之间的相互竞争。
线程安全队列的完全代码,这里全部写出来,注意看代码的注释
template<typename T>
class lock_free_queue
{
private:
struct node;
//节点之间的链接类
struct counted_node_ptr
{
int external_count;
node* ptr;
};
//头指针
std::atomic<counted_node_ptr> head;
//尾部指针
std::atomic<counted_node_ptr> tail;
//引用计数器
struct node_counter
{
//内部引用计数,大小为30bit
unsigned internal_count:30;
//外部引用计数,大小为2bit 即0-3
unsigned external_counters:2;
};
//定义元素节点
struct node
{
//基本构造函数
node()
{
node_counter new_count;
new_count.internal_count=0;
//当新节点加入队列中时,都会被tail和上一个节点的next指针所指向
new_count.external_counts=2;
//存储新值
count.store(new_count);
//下一个节点指针为空指针
next.ptr=nullptr;
//下一个指针的外部引用计数为0
next.external_count=0;
}
//释放一个节点引用
void release_ref()
{
//获取计数器指针
node_counter old_counter=count.load(std::memory_order_relaxed);
node_counter new_counter;
do
{
//将旧计数器,存入新的临时变量中
new_counter=old_counter;
//外部引用计数--
--new_counter.internal_count;
//当count与old_count相同时结束循环
}while(!count.compare_exchange_strong(
old_counter,
new_counter,
std::memory_order_acquire,
std::memory_order_relaxed
));
//当内外部引用都为空的时候,删除指针
if(!new_counter.internal_count&&
!new_counter.external_counters)
{
delete this;
}
}
std::atomic<T*> data;
//节点计数器,记录内外部引用次数
std::atomic<node_counter> count;
//链接关系类,next指针
counted_node_ptr next;
};
//增加一个外部节点的引用
static void increase_external_count(
std::atomic<counted_node_ptr>& counter,
counted_node_ptr& old_counter
)
{
//临时记录变量
counted_node_ptr new_counter;
do
{
//暂存旧计数器
new_counter=old_counter;
//增加外部引用
++new_counter.external_count;
//当counter和old_counter指向相同时,跳出循环
}while(!counter.compare_exchange_strong(
old_counter,
new_counter,
std::memory_order_acquire,
std::memory_order_relaxed
));
//计算结构存入old_counter中
old_counter.external_count=new_counter.external_count;
}
//删除外部节点的引用
static void free_external_counter(counted_node_ptr& old_node_ptr)
{
//获取旧指针的临时变量
node* const ptr=old_node_ptr.ptr;
//和添加时相反,减少两个外部引用
int const count_increase=old_node_ptr.external_count-2;
//获取计数器
node_counter old_counter=ptr->count.load(std::memory_order_relaxed);
//创建新计数器
node_counter new_counter;
do
{
new_counter=old_counter;
//外部计数器--
--new_counter.external_counters;
//拷贝引用数目
new_counter.internal_count+=count_increase;
}while(!ptr->count.compare_exchange_strong(
old_counter,
new_counter,
std::memory_order_acquire,
std::memory_order_relaxed
));
if(!new_counter.internal_count&&
!new_counter.external_counters)
{
delete ptr;
}
}
public:
lock_free_queue();
~lock_free_queue();
//添加新元素函数
void push(T new_value)
{
//创建智能指针
std::unique_ptr<T> new_data(new T(new_value));
//下一个指向链接
counted_node_ptr new_next;
new_next.ptr=new node;
new_next.external_count=1;
//暂存旧的尾部指针
counted_node_ptr old_tail=tail.load();
for(;;)
{
//增加现有指针和尾部指针的外部引用计数
increase_external_count(tail,old_tail);
T* old_data=nullptr;
//将尾部指针的数据更换为新数据,将tail指针指向新尾部
if(old_tail.ptr->data.compare_exchange_strong(
old_data,
new_data.get()
))
//当old_data=old_tail.ptr->data时成立
{
//更新尾指针指向
old_tail.ptr->next=new_next;
//将旧指针移动到old_tail
old_tail=tail.exchange(new_next);
//释放外部计数指针
free_external_counter(old_tail);
//释放指针所有权
new_data.release();
//跳出循环
break;
}
//释放指针所有权
old_tail.ptr->release_ref();
}
}
//出队列相关函数
std::unique_ptr<T> pop()
{
//加载头节点
counted_node_ptr old_head=head.load(std::memory_order_relaxed);
for(;;)
{
//增加外部计数器
increase_external_count(head,old_head);
//获取临时头节点中的node指针
node* const ptr=old_head.ptr;
//首尾节点指向一处,即队列为空
if(ptr==tail.load().ptr)
{
ptr->release_ref();
return std::unique_ptr<T>();
}
//将head指针,指向old_head旧指针指向的节点
if(head.compare_exchange_strong(old_head,ptr->next))
{
//获取左值
T* const res=ptr->data.exchange(nullptr);
//释放外部引用计数
free_external_counter(old_head);
//返回获取的指针
return std::unique_ptr<T>(res);
}
//释放旧节点
ptr->release_ref();
}
}
};
无锁队列中的线程间互助
通过在node节点中设置next指针可以在pop()函数中通过对next指针的读取方便快速的使用compare_exchange_strong,进行头指针移动;对于push的实现稍微复杂一点
template<typename T>
class lock_free_queue
{
private:
struct node
{
std::atomic<T*> data;
std::atomic<node_counter> count;
//下一个指针
std::atomic<counted_node_ptr> next;
};
void set_new_tail(
counted_node_ptr &old_tail,
counted_node_ptr const &new_tail
)
{
//获取旧尾指针
node* const current_tail_ptr=old_tail.ptr;
while(!tail.compare_exchange_weak(old_tail,new_tail)&&old_tail.ptr==current_tail_ptr);
//当前尾部指针与旧指针相同
if(old_tail.ptr==current_tail_ptr)
//释放外部计数
free_external_counter(old_tail);
else
//否则释放当前指针
current_tail_ptr->release_ref();
}
public:
void push(T new_value)
{
//新数据
std::unique_ptr<T> new_data(new T(new_value));
//新节点
counted_node_ptr new_next;
new_next.ptr=new node;
//外部引用设置为1
new_next.external_count=1;
counted_node_ptr old_tail=tail.load();
for(;;)
{
//增加外部引用
increase_external_count(tail,old_tail);
//获取旧数据
T* old_data=nullptr;
//旧尾指针数据与old_data相同
if(old_tail.ptr->data.compare_exchange_strong(
old_data,
new_data.get()
))
{
//初始化next指针,准备交换数据
counted_node_ptr old_next={0};
//当尾指针指向新节点时
if(!old_tail.ptr->next.compare_exchange_strong(
old_next,
new_next)
)
{
//删除新节点
delete new_next.ptr;
//新next指针指向原指针指向
new_next=old_next;
}
set_new_tail(old_tail,new_next);
new_data.release();
break;
}else{
//初始化新的尾指针
counted_node_ptr old_next={0};
//如果旧尾指针next指向为old_next,将next指针指向新next
if(old_tail.ptr->next.compare_exchange_strong(
old_next,new_next))
{
old_next=new_next;
new_next.ptr=new node;
}
set_new_tail(old_tail,old_next);
}
}
}
};
7.3 对于设计无锁数据结构的指导建议
参考链接: c++11 内存模型解读
通常情况下我们把atomic成员函数可使用memory_order值分为以下3组:
- 原子存储操作(store)可使用:memory_order_relaxed、memory_order_release、memory_order_seq_cst
- 原子读取操作(load)可使用:memory_order_relaxed、memory_order_consume、memory_order_acquire、memory_order_seq_cst
- RMW操作(read-modify-write)即同时读写的操作,如atomic_flag.test_and_set()操作,atomic.atomic_compare_exchange()等都是需要同时读写的。可使用:memory_order_relaxed、memory_order_consume、memory_order_acquire、memory_order_release、memory_order_acq_rel、memory_order_seq_cst
根据memory_order使用情况,我们可以将其为 3 类:
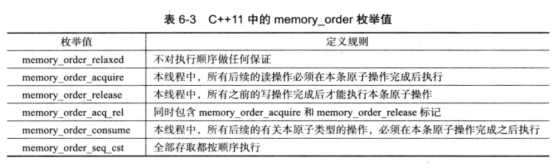
- 顺序一致性模型:std::memory_order_seq_cst;最稳定,代价最高;原子操作默认的模型,在C++11中的原子类型的变量在线程中总是保持着顺序执行的特性。
- Acquire-Release 模型:std::memory_order_consume, std::memory_order_acquire, std::memory_order_release, std::memory_order_acq_rel;若线程A中的一个原子store带memory_order_release标签,而线程B中来自同一变量的原子load带memory_order_acquire标签,从线程A的视角发生先于原子store的所有内存写入(non-atomic and relaxed atomic),在线程B中成为可见副作用,一旦线程B中的原子加载完成,则保证线程B能观察到线程A写入内存的所有内容。
注意:同步仅建立在release和acquire同一原子对象的线程之间,其他线程可能看到与被同步线程的一者或两者相异的内存访问顺序。
- Relax 模型:std::memory_order_relaxed;最不稳定,代价最低
7.3.1 使用std::memory_order_seq_cst的原型
std::memory_order_seq_cst比起其他内存序要简单的多,因为所有操作都将其作为总序。本章的所有例子,都是从std::memory_order_seq_cst开始,只有当基本操作正常工作的时候,才放宽内存序的选择。
7.3.2 对无锁内存的回收策略
当有其他线程对节点进行访问的时候,节点无法被任一线程删除;为避免过多的内存使用,还是希望这个节点在能删除的时候尽快删除。本章中介绍了三种技术来保证内存可以被安全的回收:
- 等待无线程对数据结构进行访问时,删除所有等待删除的对象。
- 使用风险指针来标识正在被线程访问的对象。
- 对对象进行引用计数,当没有线程对对象进行引用时,将其删除。
7.3.3 指导建议:小心ABA问题
在“基于比较/交换”的算法中要格外小心“ABA问题”。其流程是:
- 线程1读取原子变量x,并且发现其值是A。
- 线程1对这个值进行一些操作,比如,解引用(当其是一个指针的时候),或做查询,或其他操作。
- 操作系统将线程1挂起。
- 其他线程对x执行一些操作,并且将其值改为B。
- 另一个线程对A相关的数据进行修改(线程1持有),让其不再合法。可能会在释放指针指向的内存时,代码产生剧烈的反应(大问题);或者只是修改了相关值而已(小问题)。
- 再来一个线程将x的值改回为A。如果A是一个指针,那么其可能指向一个新的对象,只是与旧对象共享同一个地址而已。
- 线程1继续运行,并且对x执行“比较/交换”操作,将A进行对比。这里,“比较/交换”成功 (因为其值还是A),不过这是一个错误的A(the wrong A value)。从第2步中读取的数据不再合法,但是线程1无法言明这个问题,并且之后的操作将会损坏数据结构。
解决方案:解决这个问题的一般方法是,让变量x中包含一个ABA计数器。“比较/交换”会对加入计数器的x进行操作。每次的值都不一样,计数随之增长,所以在x还是原值的前提下,即使有线程对x进行修改,“比较/交换”还是会失败。
7.3.4 指导建议:识别忙等待循环和帮助其他线程
在最终队列的例子中,已经见识到线程在执行push操作时,必须等待另一个push操作流程的完成。等待线程就会被孤立,将会陷入到忙等待循环中,当线程尝试失败的时候,会继续循环,这样就会浪费CPU的计算周期。当忙等待循环结束时,就像一个阻塞操作解除,和使用互斥锁的行为一样。通过对算法的修改,当之前的线程还没有完成操作前,让等待线程执行未完成的步骤,就能让忙等待的线程不再被阻塞(减小锁的粒度)。在队列例中,需要将一个数据成员转换为一个原子变量,而不是使用非原子变量和使用“比较/交换”操作来做这件事;要是在更加复杂的数据结构中,这将需要更加多的变化来满足需求。